Your cart is currently empty.
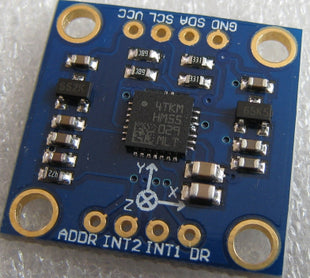
LSM303DLH triaxial accelerometer module electronic compass electronic compass sensor
Rs. 580.00
Availability: In Stock
SKU : CC1212130137
Quick OverView
LSM303DLH triaxial accelerometer module electronic compass electronic compass sensor
Qty:
LSM303DLH triaxial accelerometer module electronic compass electronic compass sensor